4
Consideration of Design and Engineering Alternatives
In accordance with Clause 3.3.2 of the EIA Study
Brief, this section of the EIA Report considers design and construction
options as part of the assessment of alternatives for the proposed offshore
wind farm development. The section has
been divided into a discussion of the following alternatives:
·
wind
farm size and layout;
·
wind
turbine structural components;
·
wind
turbine lighting and marking; and
·
construction methods.
Based on the above considerations, the preferred
development scenario is presented in Section
5.
4.2.1
Wind Farm
Capacity
In order to help meeting renewable energy targets for
4.2.2
Wind Farm
Layout
Identification of the preferred layout of the turbines
within the identified development area has considered the following factors:
·
Site
constraints;
·
Submarine
cable crossings;
·
Wind
characteristics and wake loss;
·
Seabed
characteristics; and
·
Cable
circuit layout.
Site Constraints
Section 3 of this EIA Report has considered a
number of environmental and physical constraints that have determined the boundary within which the
wind farm could be located. Some of
the key constraints are summarised as follows:
·
Presence
of high volume marine traffic routes to the east, west and north – including
the avoidance of marine fairways and buffer zones;
·
Location
of helicopter flight paths to the north and west;
·
Distance
from sensitive sites around the coast of Cheung Chau
and
·
Presence
of a gas pipeline to the east of the site;
·
Presence
of the South Cheung Chau open seafloor mud disposal
area to the west of the site;
·
Boundary
of Hong Kong Territorial Waters to the south of the site; and
·
Proximity
to Visual Sensitive Receiver’s, including those at
Based on these constraints a preferred boundary has
been developed as shown in Figure 1.1
in Section 1 of this EIA Report. In addition to the above constraints,
the marine archaeological investigation undertaken for the EIA has confirmed
the presence of a wreck site in proximity to the wind farm area, which has been
avoided as part of the configuration of the wind farm layout (see Section 12).
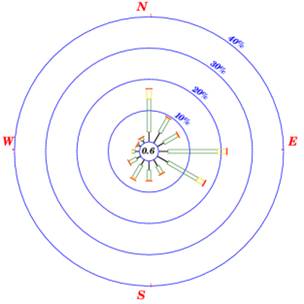
Wind Characteristics and Wake Loss
Although wind monitoring at the site has not yet been
carried out, the predominant wind direction at the wind farm site is north
easterly with also a relatively large incidence of northerly and south-easterly
winds (see Figure 4.1). This is an important consideration when
looking at the potential for wake losses across the wind farm.
Figure 4.1 Annual
Wind Rose for Cheung Chau (1993-2008) ([1])
|
|
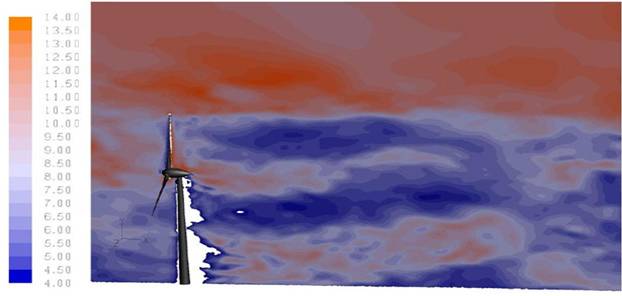
Each individual turbine will lead to a reduction in
wind speed immediately behind it.
This effect is reduced downwind of the turbine as the “wake” region
mixes with the unaffected airstream, so that a distance of approximately ten
rotor diameters the wind speed will be similar to the original value. Individual turbines therefore need to be
suitably spaced to maintain energy capture across the wind farm area. Figure
4.2 demonstrates a typical “wake effect”.
Figure 4.2 Contours
in Velocity Magnitude in ms-1 at a Wind Velocity of 10 ms-1
at turbine hub height ([2])
|
|
Typical spacing between turbines within a wind farm
is 5 times to 10 times rotor diameter in the prevailing wind direction and 3
times to 5 times rotor diameter in the crosswind direction. Table
4.1 shows the spacing arrangements required under the different turbines
scenarios with a minimum and maximum rotor diameter discussed in Section 4.2 below.
Table 4.1 Wind
Turbine Spacing Requirement for Different Turbines
|
Rotor Diameter |
Cross wind Spacing (m) (North – South) |
Prevailing Wind Spacing
(m) (East – West) |
||
|
|
Minimum |
Maximum |
Minimum |
Maximum |
|
80 |
240 |
400 |
400 |
800 |
|
111 |
333 |
555 |
555 |
1,110 |
An examination of wake loss has not been undertaken
for the Project at the time of writing the EIA. For the purpose of this EIA a value between
the minimum and maximum spacing has been taken forward for the maximum rotor
diameter within the overall area available for development that is not
constrained (see above and Section 3). Therefore at the wind farm site the
proposed separation distance will be between the minimum and maximum spacing
presented in Table 4.1 for a rotor
diameter of 111 m (see Section 5). It should be noted, however, that the
actual wind spacing between turbines will be optimised during the Detailed
Design with the overall intention to reduce the footprint of the wind farm area
without compromising turbine operation.
Wind Monitoring Mast
In addition to the turbines, a wind monitoring mast
will be installed within the development area. The purpose of the mast will be to investigate the
meteorological conditions at
the site, including key data on wind speed and direction. Wind monitoring
mast will consist of a steel lattice tower erected on top of an offshore
foundation. Wind measurement equipment including wind vanes and cup
anemometers, etc. will be mounted at various levels along the lattice tower to
capture wind resources data up to the wind turbine hub height level. Tidal and wave conditions will also be
monitored through sensors installed at underwater levels. Data collected will be stored and
transmitted onshore for subsequent evaluation and analysis. There are others means of wind
monitoring technique including the adoption of LIDAR (Light Detection and
Ranging) system which is regarded as a new and innovative technology for wind
measurement. The LIDAR system has not, however, been widely deployed for offshore wind data
collection and the
effectiveness and reliability of
this technique would need further investigation.
Therefore it is assumed at this stage that lattice tower structure will be constructed for the wind monitoring
mast and has been taken as basis of this EIA study.
Seabed Characteristics
Seabed properties can alter the practicality of
constructing wind turbine foundations.
Potential constraints include the presence of natural or man-made
obstructions, seabed slopes and sediment composition. A geophysical survey has been carried
out at the site to determine the seabed characteristics at the wind farm site
and along the cable route. These
results and future additional geophysical survey will be used during Detailed
Design to verify/modify the location of wind farm structures and the cable
route alignment.
Cable Circuit Layout
Subsea power cables are required to connect the wind
farm to the electricity distribution system. This includes the requirement to link
turbines to the substation and also to take power from the substation to HK
Electric’s grid. Figure 4.3 provides an illustration of a
typical subsea cable that will be installed between turbines.
Figure 4.3 Typical
Subsea Cable
|
|

Section 3 has considered the environmental
constraints for the cable route from the wind farm to the landing point so that
key environmental features would not be significantly impacted during
construction works.
For the inner turbine array, the electrical layout of
the wind farm has been determined by assessing the relative costs and benefits
of cable configurations including strings of turbines. Although, the layout of cables is
subject to Detailed Design, for the purpose of this EIA, it is assumed that
there will be an electrical configuration of five to six strings of turbines running from north to
south across the wind farm area.
There will be a requirement for each string of turbines to be linked to the offshore
substation. This configuration
would strike a balance between cable lengths and the inherent redundancy of the
network should a fault occur between the adjacent turbines. Furthermore, this configuration reduces
the number of cable crossings, which could be associated with more random
turbine layouts, particularly related inter turbine array cabling.
Summary
In order to inform the EIA, a preliminary layout has
been developed, which takes account of the site constraints discussed
above. An interim geometric grid
pattern has been taken forward that reduce wake loss and reduces potential
marine traffic collision risk associated with more random layout patterns (see Section 11) and that is likely to
minimise visual impacts associated with turbine scatter (see Section 5). As discussed, this layout is only
preliminary and is subject to refinement during Detailed Design and to meet any
recommendations set out in this EIA.
4.3
Wind Turbine Structural Components
4.3.1
Turbine Size
and Design
Wind turbines can incorporate two or three rotor
blades. The standard turbine design
that is adopted for offshore wind farm developments internationally
incorporates 3 blades. This design also
presents potential for greater visual impacts and therefore this design has
been considered as the preferred design in this EIA in order to take forward a
worse case approach for the assessment.
The wind turbines will be of proven technology and design, which
typically incorporates tapered tubular towers attached to a nacelle housing
containing the generator, gearbox and other operating equipment. The turbine transformer will be located
either at the tower base (above the high tide level) or at the top of the
tower, depending on the type of wind turbine procured. The transformer will either be
oil-filled (surrounded by a bund conforming to the required standards) or
cast-resin. These design elements
are set by the manufacturer and therefore alternative design are not available
and have not been assessed.
Outline properties of present-day turbines that are
likely to be used for the development are shown below in Table 4.2.
Table 4.2 Typical
Properties of Commercially Available Wind Turbines
|
Supplier |
Model |
Capacity (MW) |
Rotor Diameter (m) |
Hub Height (m) |
|
Vestas |
V90-3.0MW |
3 |
90 |
Variable |
|
Siemens |
SWT-2.3-82 |
2.3 |
82 |
Variable |
|
|
SWT-3.6-107 |
3.6 |
107 |
Variable |
|
GE Energy |
3.6sl |
3.6 |
111 |
Variable |
|
Nordex AG |
N90 |
2.5 |
80 or 90 |
Variable |
A decision has yet to be made on which turbine will
be sourced for the wind farm. The
capacity of the turbines could therefore range from 2.3 to 3.6 MW. It is therefore proposed that the
preliminary site layout considers the development of around 30 - 35 nos. of
wind turbines so that a capacity of approximately 100MW can be met. Should 3.6 MW class wind turbine be
selected, the number of wind turbines would be reduced to around 28 to 30.
Preliminary dimensions are not expected to exceed a
tip height of +125mPD (see Section 3). In the event the wind turbine model with
a maximum rotor diameter of 111m be adopted, the maximum tip height would be
+136mPD. It was considered
appropriate that the maximum rotor diameter of 111 m be taken forward for the
impact assessment as this presents potentially a worse case scenario for
impacts on the visual environment and ecology.
4.3.2
Foundation
Design
The wind turbines and wind monitoring mast will be
supported on foundations fixed to the seabed. The final configuration of the support
structures for the project will be subject to the following considerations:
·
selection
of wind turbine;
·
ground
conditions including geology and seabed stability;
·
metocean conditions (wave, current, tide);
·
life-cycle
cost; and
·
access
and maintenance requirements.
Each foundation type will have an access platform
incorporated into the design. The
platform has one or more ladders (with integral personnel safety protection),
enabling access to the foundation at any state of the tide. The structures will have provisions for
personnel safety, e.g. life-rings.
The following foundation designs have been considered
for the wind turbines which have been derived following preliminary engineering
design, using site geological information and representative wind turbine
loadings provided by turbine manufacturers and from wind and wave
loading estimated specifically for the site. The
design options considered feasible for this wind farm are discussed below.
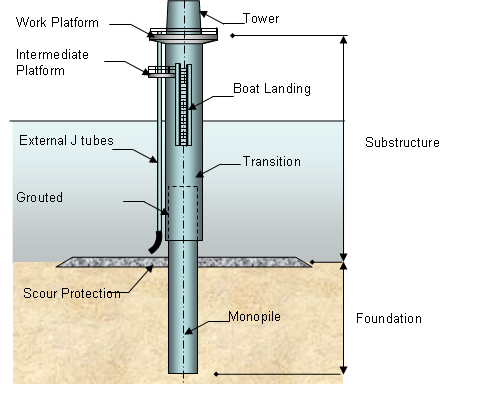
Monopile
These structures rely on the frictional
properties of the hollow steel pile fixed into the seabed either by driving
(using a hydraulic hammer), drilling or drilling and driving.
The monopile for this size of turbine is
anticipated to have a diameter of 5 to 7 m which will lead to a physical
footprint of approximately 38.5 m2 with a pile wall thickness of
approximately 80 mm. Figure 4.4 shows a typical monopile foundation.
Figure 4.4 Monopile Foundation ([3])
|
|
Tripod / Tetrapod Pile
The tripod pile foundation consists of a structure
connecting three open–ended steel piles located at a distance from a central
element attached to the turbine tower.
The diameter of each tripod pile is estimated to be 1.6 m with a 7 m separation distance between
each tripod pile. The subsequent
physical footprint will be in the order of 6 m2 for each tripod group (representing
the 3
nos. of net pile area). The piles will be
terminated at its top at the seabed level for connecting with an underwater
pyramid steel frame substructure. These three piles together with steel frame
substructure will support the wind turbine ‘monopole’ tower. Tripod is commonly adopted in shallow
water with moderate wave force. Figure
4.5 shows a typical tripod pile foundation.
Figure 4.5 Tripod
Foundation ([4])
|
|

The tetrapod pile foundation is similar to the tripod
foundation in which 4 piles instead of 3 piles are used. In addition, the underwater substructure
frame will be more robust with layer of bracings. The diameter of each tetrapod pile is estimated to be 1.6 m with a 15~20m separation distance between each tetrapod
pile. The subsequent physical
footprint will be in the order of 8 m2 for each tetrapod group (representing the 4 nos. of net pile area). These four piles together
with steel frame substructure can support a larger intermediate decking
platform for placing the wind turbine tower. Tetrapod is
commonly adopted in deeper water with significant wave forces.
Both tripod and tetrapod substructure will require a heavy lifting barge
for placing the structure precisely in place. Deep water welding is required for its
connection to the piles. Figure
4.6 shows a typical tetrapod pile foundation.
Figure 4.6 Tetrapod Foundation
|
|


Gravity Base Foundation
Gravity base foundations normally consist of a
concrete base that sits on the seabed.
This type of foundation relies on the mass of the foundations (sometimes
with additional ballast) to withstand any lateral movement of the
foundations. The concept often
requires the seabed to be prepared prior to installation, i.e. the top layer of
material is removed and replaced by a stone bed. Post-installation, the base is filled
with a suitable ballast material.
In addition, a steel “skirt” may be installed around the base to
penetrate into the seabed and to constrain the seabed underneath the base. Figure
4.7 shows a typical tripod pile foundation.
Figure 4.7 Typical
Gravity Base Foundation (1)
|
|

Scour Protection
Scour is the term used for the localised removal of
sediment from the area around the base of support structures located in moving
water. When a structure is placed in
a current, the flow is accelerated around the structure, and the vertical
velocity gradient of the flow is transformed into a pressure gradient on the
leading edge of the structure. This
pressure gradient results in a downward flow on to the seabed forming a vortex,
which sweeps around and downstream of the structure. Locally, shear stress increases at the
seabed next to the structure. If
the seabed is erodable (and the shear stresses are of
sufficient magnitude), a scour hole forms around the structure. This phenomenon is known as local or
structure-induced sediment scour.
At the structure, any initial period of erosion is followed by a period
of equilibrium, reached when the flow alteration caused by the scour hole
reduces the magnitude of the shear stresses such that sediment can no longer be
mobilized and removed from the hole.
For the purposes of this assessment, it has been
assumed that some scouring of the upper soft seabed sediments may occur. There are two design philosophies used
to address scour. The first is to
allow for scour in the design of the foundation (thereby assuming a
corresponding larger water depth at the foundation) or to install scour
protection around the structure such as rock dumping or fronded
mattresses. Designing the foundations
for scour will lead to increases in penetration depths and potentially increase
the size of the foundations, and therefore additional fabrication and handling
weights both leading to increases in the cost.
A number of options are available for the scour
protection design, including the use of rock or the use of high tensile
strength buoyant frond scour control systems. Figure
4.8 and 4.9 show a typical scour
protection structure and a frond mat system designs, respectively.
Figure 4.8 Scour
Protection
|
|

Figure 4.9 Frond
Mat System ([5])
|
|

The frond mat system has not, however, been deployed
in Hong Kong and the effectiveness of this technique is therefore unknown. Therefore at this stage, it is assumed
that rock scour protection will be constructed, if necessary, as this is a
proven technology. In addition,
rock scour provides potential environmental benefits as it could act as
additional hard substratum for colonisation thereby acting as an artificial
reef.
Preferred Foundation Design Option
The preferred design option will be confirmed during
the Detailed Design stage. From
geotechnical information and engineering principles available at this time it
can be concluded that a gravity base foundation will not be acceptable as the
seabed of the wind farm site is composed of soft silty
sediments. The softer seabed could
lead to instability in the foundations.
In addition, gravity base foundations will lead to a relatively large
footprint of impact, a large amount of sediment excavation and potential for
relatively high water quality impacts in comparison to other options. The gravity base option is not generally
the preferred approach for foundation design for international wind farms for
these reasons.
It is therefore proposed that a piled option would be
preferred. In order to inform the
impact assessment, it is considered that the monopile
option presents the worst case scenario for the wind turbines in terms of
disturbance to the seabed as it has a larger footprint. Also, scour protection would only
normally be required for monopile foundations, which
could potentially lead to greater impacts during construction and operation
associated with seabed disturbance.
It is therefore suggested that assessment of monopile
foundations are taken forward for the turbines, which would allow for future
flexibility of design.
Since the piling system for
the wind monitoring mast is comprised of 8 nos. of 1.6m diameter steel tubular
piles fixed into seabed in which each pile individually can be considered as a
small monopile, the monopile option will
also be taken forward for the wind monitoring mast by considering it as a lattice of small monopiles.
An indicative drawing of the wind monitoring mast design is presented in
Figure 4.10.
It is worth noting that
the wind monitoring mast pile are terminated at its top at an above sea level of
approx. 18 mPD for supporting a concrete deck
platform which in turns to support the wind monitoring mast lattice tower. Without a robust underwater steel
substructure, 8 nos. of piles will be adopted in lieu of the typical 3 or 4 nos. for tripod or tetrapod.
Although the nos. of piles will be doubled, heavy lifting barge and
risky deep water welding for installing the steel substructure can be
avoided. In addition, conventional
static load test on piles can be conducted above water which warrants the
timely approval by the Buildings Authority and the subsequent commissioning of
the wind monitoring process.
Figure 4.10 Indicative
Design for Wind Monitoring Mast Structure
|
|

4.4
Wind Turbine Lighting and Marking
Although the proposed wind
farm will not directly impact on aviation routes with the alteration to
existing helicopter procedures (see
Section 3), the Civil Aviation Department (CAD) requires that the wind
turbines be provided with suitable lighting and markings. In general, markings consist of the use
of alternative orange and white bands.
Previous studies ([6])
have
investigated the preferred marking option.
A number of proposals for the marking of turbines have been considered
as shown in Figure 4.11, which aim to
provide the necessary warning without being too visually intrusive.
Figure 4.11 Turbine
Marking Options
|
|

It is clear from Figure 4.11 that Option 1 would have the
highest visibility and Options 6, 8 and 9 the lowest visibility. Consultations with CAD, however, have
determined that Options 9 and 10 would be acceptable depending upon their location
in the wind farm array. Option 9
would be acceptable within the wind farm site and Option 10 at the
periphery. These two options are
thought to strike the best balance between satisfying the requirements of CAD
for the marking of wind turbines whilst being visually less intrusive than
other possible options. This
approach has been agreed with CAD as part of the discussions for this
Project.
In addition, to marking,
lighting of the wind turbine structures, substation and offshore monitoring
mast will be required for aviation and navigation. Preferred lighting requirements for
offshore wind farms have been defined by the CAD. In addition, discussions with the Marine
Department have determined lighting requirements for the turbine structures
should be in line with the International Association of Marine Aids to
Navigation and Lighthouse Authorities (IALA) Recommendation 0-117 of May
2000. It is therefore proposed that
lighting be taken forward that meets CAD and Marine Department requirements. Section
5 provides a more detailed discussion of the preferred approach for marking
and lighting arrangements for aviation and navigation, with the potential for
any impacts to avifauna associated with the selected design assessed in Section 8.
4.5
Alternative Construction
Techniques
4.5.1
Foundation
Installation
A number of alternative construction techniques are
available for the construction of the foundations for both the turbines and the
wind monitoring mast. Three
alternatives are available for the former, namely percussive or piled
foundations or those installed through suction can methods. For the wind monitoring mast, only
percussive or bored piling methods are considered suitable. A discussion of each of these methods is
presented below.
Piled Foundations
Piled foundations are the most common form of
foundation method used in the offshore wind industry, transferring both tensile
and compressive loads from the foundation into the seabed ([7]).
They have been installed since the 1940’s in water depths up to 150m. They are simple to construct using large
steel tubing and offer the most proven manufacturing option among the different
types of foundations. The
installation method involves lifting or floating the structure into position
using equipment such as floating crane vessels, drilling jack-up units, and
specially constructed installation vessels before driving the piles into the
seabed. Installation depths are
typically dependent on the environmental and soil conditions, and can range
from 5m to over 120m below the seafloor for some offshore structures. Piling is typically undertaken using
percussive means, with bored piling a less common option.
Percussive Piling
Percussive piling in the marine environment is a
proven technology in
A summary of potential issues from percussive piling
methods are presented below.
·
Fine
material will be generated as a result of the piling process in the footprint
of pile disturbance and in the area adjacent to the pile that will be agitated;
·
Using
grout to fix the foundation to the sleeve case with the potential leakage of
materials (see Section 5); and
·
Sounds
will be generated during piling activities.
Bored
Piles
Bored piling in the marine environment is a also a
proven technology in
A summary of potential issues from bored piling
methods are presented below.
·
A
large casing must be driven into the seabed in order to support the boring
equipment which will necessitate a longer construction period;
·
A temporary platform need to be constructed from
which the bored piles will be installed. This activity will also generate noise
and lengthen construction time.
·
Socketing into the bedrock will require the use of a chisel
(noise impacts from socketing may be mitigated by
using the reverse circulation drilling method);
·
Sound
will be generated during drilling activities;
·
Fine
material will be generated as a result of the drilling process, which will need
to be pumped to a support barge for disposal. There is potential for leakage of water and sediments from barges; and
·
Using
grout to fix the foundation to the sleeve case with the potential leakage of
materials (see Section 5).
·
As the concreting volume is large, the marine
transportation will be increased significantly, which will also have a
noise/sound impact.
Suction Can
Suction techniques are new to offshore wind farms,
although a trial has been undertaken by CLP in Eastern Offshore waters for
installation of an offshore wind monitoring mast ([8]).
Suction cans consist of tubular steel foundations installed by sealing the top of the steel buckets and creating a vacuum inside. The difference in hydrostatic pressure and the dead weight of the structures cause the buckets to penetrate the soil. The
foundation can, suction pump and associated equipment will be brought to the
designated area by crane barge and tug boat. The crane barge will be deployed to lift
the foundation can to the seabed level.
Once the foundation is placed on the seabed, the suction pump will be
operated to pump water from inside the foundation. This will push the foundation into
seabed until the desired penetration depth is reached. This technique is likely to create less
sound than the piling techniques and potentially less waste than bored piling.
The primary limiting design condition for the monopod
suction caisson is the overturning moment, while for a multi-leg suction
caisson configuration; the resistance to tensile loads is paramount ([9]).
As such, a key requirement to suction caissons is the verification of
installation ability and uplift capacity, where the seafloor soils must be
penetrable and not prone to scour.
A disadvantage to using suction caissons is the limited proven
installation data for different types of soils, requiring detailed installation
analyses prior to design. Suction
caissons are also susceptible to scour, and piping below the bucket tip may
occur in sandy soils.
Most of the current research on suction caissons has been carried out
for sands. However, the material at
the proposed wind farm site is considered to be composed of very soft clays and
silts. Therefore, the feasibility
of using these foundations would require further investigation. It is also considered important to note, that the
selection of the suction can technique for the offshore wind farm in Southeastern Waters was due to restrictions at the
site. Studies conducted for the
wind farm found that geological conditions in the selected area would not be
conducive to using piling (either bored or percussive) and hence an alternative
method was identified ([10]).
Hence it is possible that should the more proven method of piling have
been feasible, such a method would have been selected for the long term
installation of turbine foundations.
Preferred Construction Method
It is proposed that the percussive piling method be
used for the construction of the wind turbine and wind monitoring mast
foundations. The rationale for such
is based on the following:
·
Environmental Impacts;
·
Proven
Method;
·
Proven
Mitigation;
·
Schedule.
Each of these is discussed below.
Environmental
Impact
In contrast to percussive piling, which
generates no wastes (i.e. marine sediments) to be brought to the surface, bored
drilling activities do generate wastes that require off-site disposal. For the proposed project, it has been
estimated that up to 185,000 m3 of marine sediment would be brought
to the surface through bored piling activities for the turbines and wind
monitoring mast and hence require disposal at one of Hong Kong’s disposal
facilities. Disturbance and
disposal of marine sediments has the potential to increase concentrations of
suspended solids within the water column, subsequently potentially reducing
dissolved oxygen and increasing nutrient content, and as such methods that
avoid waste generation are considered to be environmentally favourable. As percussive piling has no waste
generation associated with these activities this method is considered to have
better environmental performance.
It is noted that percussive piling can be expected to generate higher
levels of underwater sound than bored piling. As discussed below there are proven
methods available to mitigate the effects of underwater sound generated during
percussive piling.
Proven Method
As highlighted above, the typical method to install
piles in Hong Kong is through percussive means, i.e. hydraulic hammering. Such a method has been deemed acceptable
for piling operations in
Whilst there are other available technologies and engineering
alternatives for the installation of monopiles, these
are considered to either still be in their development stage or in their
infancy of testing and implementation.
Suction can technology may be viable alternative for installation,
however, considering it is yet to be a proven technology in
Figure 4.12 Installation
of Monopile Turbine Foundation at 60MW Scroby Sands Wind
|
|

Proven Mitigation
A series of mitigation measures have been adopted in
marine piling works in
Typical measures are as follows:
·
Piling
works are undertaken using hydraulic hammers, which typically have lower sound
output than traditional diesel hammers;
·
Piling
works take place in daylight hours (e.g. 6am to 6pm);
·
Piling
works avoid peak seasons of marine mammals;
·
Piling
works are undertaken in marine mammal exclusion zones which are monitored by
marine mammal observers;
·
Pre-,
during and post-installation monitoring of marine mammal abundance and
distribution; and
·
Production of warning sounds before commencing
piling, consisting of sufficiently loud but non-hazardous sounds to alert
marine mammals in the area.
Key projects have demonstrated that through the
effective implementation of the above, impacts to marine mammals can be avoided
and percussive means of piling can be undertaken with favourable environmental
performance.
It is expected that through the employment of those
above mitigation measures which are deemed necessary for the project adverse
underwater construction noise associated with the piling works would not be
expected to give rise to unacceptable adverse impacts. Such a conclusion is further examined
within the Marine Ecological Assessment
(Section 9).
Schedule
Following the principles of seeking to achieve
increased environmental performance by limiting the construction period to as
short as possible, thereby reducing the potential exposure of sensitive receivers to disturbance or
pollution loading, it is considered important to select the most appropriate
equipment to achieve this goal. As
described above, the preferred method for installation of the monopile is through piling. There is, however, a considerable
difference in the schedule required for percussive versus bored piling.
Nearly the entire overseas
offshore wind farms have adopted percussive piling as means of monopile foundations.
A review of
international experience in construction schedules of offshore wind farms shows
that monopile installation using percussive piling
methods typically take at most 4 days to install each
pile depending on down time due to weather (Table
4.3). On this basis, it can be
seen that the maximum duration of piling for these wind farms under review was
approximately 5 months, with variation between depending on the number of piles
involved. Typical depth of piling
was 20 – 40 m below seabed. Subject
to the final ground investigation works, it can thus be expected that the
installation of up to 35 piles for the proposed wind farm would take in the
same order of time, 4 to 5 months,
weather dependent.
Table 4.3 Duration
of Percussive Piling Works for International Wind Farms
|
Project |
Number of pile / turbine |
Pile length [m] |
Water depth (m) |
Pile depth in seabed (m) |
Duration |
|
Horns Rev I, |
|
||||
|
Burbo
Bank, the |
|
||||
|
Scroby Sands,
the |
|
||||
|
Rhyl Flats,
the |
|
||||
|
Egmond aan Zee, the Netherlands |
|
||||
|
Gunfleet
Sands, the |
|
||||
|
|
Within the month of September 2000 |
||||
|
Horns Rev II, |
|||||
|
|
|
||||
|
Robin Rigg, the |
|
||||
|
Kentish Flats,
the |
|||||
|
Arklow Bank,
the |
|||||
|
Princess Amalia, the |
At the proposed wind farm, the water depth is over 20
m and the general thickness of marine deposits and alluvium as determined from
existing drillholes was in excess of 60m (or at a
depth greater than -80 mPD). As such, the strata of weathered bedrock
and bedrock may be at depths greater than -100 mPD. The recorded wave height as indicated in
Port Works' publication is in the order of 11 to 12 m. Consequently, construction of bored
piles must be carried out on a large jack up barge or a temporary platform
fixed on piled foundation.
Construction of a fixed platform, depending on the size of platform,
takes time. A mono-piled wind
turbine may be supported by one large mono pile of about 3 to 7 m in
diameter. Construction of one
single piece of bored pile of that range of diameter would require special plant
that is very rare if not unavailable; or the mono pile is supported by a
cluster of bore piles of smaller diameter, say less than 3 m. It is assumed for each mono pile a
cluster of 3 bore piles are considered necessary, thus about 90 bore piles will
be needed for the wind farm.
Construction of a bore pile at sea to depths in excess of 80 m would
take about 1- 1.5 month under normal working conditions. Allowing for concreting and
mobilisation, it can conservatively be assumed that ~1.5 to 2 months would be
needed to complete one bore pile (assuming the platform for the next cluster of
bored piles is erected at the same time).
On this basis, it will take about 70 months (6 years) to complete all 90
piles for 30 mono-piles to the wind farm.
It is assumed that to minimise the noise level, only two sets of bore
pile machine are to be employed.
Such duration is considered to be a significant increase and one that
may result in the project being environmentally and commercially unviable.
Given the exposed marine working environment in
Southwest Lamma, the construction of bored piles in
water depths of around -20m would be very different to those encountered during
the works for the Shenzhen Western Corridor in
Figure 4.13 Construction
of
|
|

The above approaches contrasts with that required to
conduct bored piling in open sea of significant water depth. A robust piled platform would need to be
installed that is capable of handling the exposed weather conditions. Figure
4.14 presents a typical set up for foundation works at open sea.
Figure 4.14 Construction
of Piled Marine Platform for use in Bored Piling works in open sea conditions
|
|


{kind=link}
Furthermore, should restrictions be imposed on
construction works, such as closed period during marine mammal peak seasons,
which can last up to six months, this may push the schedule to over 10 years of piling works with a single
set of piling plant, or even 3 years using three sets of piling plants, which
is still unrealistically long for piling works. Moreover, using 3 sets of plant will
significant increase the sound footprint for the works. Such an
increase in duration would result in a prolonged exposure of increased levels
of marine traffic and underwater sound generating works in these southern waters and would be deemed
to be less preferred on
environmental grounds than a construction period of shorter duration.
4.5.2
Subsea Cable
Installation
Grab Dredgers
A grab dredger comprises a rectangular pontoon on
which is mounted a revolving crane equipped with a grab. The dredging operation consists of lowering
the grab to the bottom, closing the grab, raising the filled grab to the
surface and discharging the contents into a barge. Grab dredgers are usually held in
position while working by anchors and moorings but some have a spud or pile,
which can be dropped onto the bottom while the dredger is operating.
Grab dredgers may release sediment into suspension by
the following mechanisms:
·
Impact
of the grab on the seabed as it is lowered;
·
Washing
of sediment off the outside of the grab as it is raised through the water
column and when it is lowered again after being emptied;
·
Leakage
of water from the grab as it is hauled above the water surface;
·
Spillage
of sediment from over-full grabs;
·
Loss
from grabs which cannot be fully closed due to the presence of debris;
·
Release
by splashing when loading barges by careless, inaccurate methods; and
·
Disturbance
of the seabed as the closed grab is removed.
During the transport of dredged materials, sediment
may be lost through leakage from barges.
However, as discussed above, dredging permits in
Sediment is also lost to the water column when
discharging material at disposal sites.
The amount that is lost depends on a large number of factors including
material characteristics, the speed and manner in which it is discharged from
the vessel, and the characteristics of the disposal sites. In addition, closed grab dredging can
minimise the loss of sediment and therefore help reduce water quality
impacts.
Trailing Suction Hopper Dredgers
Trailing Suction Hopper Dredgers (TSHD) are designed
to use a suction mouth at the end of a long pipe. As the barge moves, the suction hopper
trails along and sucks up the soft seabed sediments. During dredging the drag head will sink
below the level of the surrounding seabed and the seabed sediments will be extracted
from the base of the trench formed by the passage of the draghead. The main source of sediment release is
the effect of the draghead when it is immersed in the
mud. This mechanism means that
sediment is generally lost to suspension very close to the level of the
surrounding seabed.
During dredging marine sediments are pumped into the
vessel’s hopper. Once the hopper is
loaded the dredging operation will be stopped and the vessel will sail to a
designated disposal area. A TSHD is
usually positioned by dynamic positioning, thus they have no anchor wires. In comparison to grab dredgers, TSHDs generally have a higher production rate.
Jetting
The jet machine will either be self-propelled or be
towed by barge. The self-propelled
machine has wheels resting on the cable and uses the cable for traction. Stability is achieved with the use of
buoyancy aids. A ‘Non-conventional’
jetting machine may be utilised, as it does not use air to assist with
discharge of the sediment. This
results in less adverse effect on the water quality of the surrounding
areas.
From the soil data, a nozzle configuration that best
suits the in-situ soil
characteristics will be determined.
The method is based on fluidising the muds
allowing the cable to sink to the chosen depth.
During the installation of the submarine utilities
using jetting technology, it would be expected that seabed sediment would be
released close to the seabed and will settle out relatively quickly. The sediment would therefore only be in
suspension for a short period of time, has reduced lateral spread from the
works area and as such, the potential for impacts to occur, such as through the
exertion of the oxygen demand on the receiving waters, will be limited.
Preferred Installation Techniques for the Submarine
Cable
Jetting, grab dredgers and Trailing Suction Hopper
Dredgers (TSHD) are commonly used in
The employment of jetting, grab dredging and TSHD are
considered viable engineering options.
However, the generally preferred installation method for submarine
cables is the use of jetting as this would lead to lower water quality impacts
than dredging techniques due to the potential to cause disturbance and impacts
on-site with dredging works and off-site with disposal works. However, jetting at the nearshore zone would not be suitable for cable installation
to shore. For the nearshore cable installation, there will therefore be a
requirement for seabed preparation using grab dredging techniques.
4.5.3
Cable Crossing
and Protection
The new 22kV, 33kV or other voltage rating according to
the proprietary design of wind turbine manufacturer’s submarine cables will
have to cross over existing submarine communication cables. The typical crossing method is to lower
the existing communication cable and then lay the new cable above the existing
cable (see Section 5). Additional protection for the submarine
cables, including in-situ concrete mat and reinforced concrete covers, could be
installed at the crossing points.
{kind=link}